�ǔ��ɕK�v�Ȑ��x�Ɛԓ��V
����ǔ��B�e���Ă���Ԃɂ��A�ԓ��V�̉�]�ɂ͎�̃Y��(�덷)�������Ă��܂��B ���̃Y�������ȏ�ɂȂ����ꍇ�ɂ́A�Y���̓f�W�^���J�����̉摜��Ő��̗���Ƃ��Ďʂ��Ă��܂��܂��B
�œ_�������Z�������Y���g�p�����ꍇ�͊g�嗦���Ⴂ���߁A�Y���̋��e�͈͂͑傫���Ȃ�܂����A �]�������Y���g���ꍇ�ɂ͒��ӂ��K�v�ł��B ���̃y�[�W�ł́A���̃Y��(�K�C�h�G���[)�̋��e�l�Ƌ��ɁA�ǔ�������錴���Ƒ�������@�艺���čl�@���Ă��܂��B
�K�C�h�G���[�̋��e�͈�
�ǔ��B�e��K�C�h�B�e���̃Y���̋��e�͈͂́A��ʓI�Ɋp�x�̕b(")�ŕ\����܂��B ���̊p�x���傫���قǃY���̋��e�l���傭�A�����ǔ��ɖ�肪�����Ă�����_���Ɏʂ����߂邱�Ƃ��ł��܂��B
�����������㗬�ꂸ�Ɏʂ�K�C�h�G���[�̋��e�͈͂́A�g�p���郌���Y��V�̖]�����̏œ_�����ɂ���ĈقȂ�܂��B �K�C�h�G���[�̍l�����Ƃ��Ă͈ȉ��̐}�̒ʂ�ŁA�ő�̋��e�͈͈͂ȉ��̎��ŋ��߂��܂��B

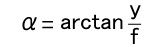
������"f"�͎g�p������w�n�̏œ_�����A"y"�̓f�W�^�����t�J�����̎B���f�q��ŋ��e�ł���ő�̃Y���ʂł��B ������"��"���A���w�n�S�̂̃Y���̋��e�p�x�ƂȂ�܂��B �Ȃ��A�����ł́uy=10��m(0.01mm)�v�Ƃ��Čv�Z���Ă��܂��B
���̕\�́A���̌v�Z����p���ďœ_�������Ƃ̃K�C�h�G���[�̋��e�͈͂��܂Ƃ߂����̂ł��B �܂��A�V�̎B�e�ɂ悭�g�p�����24�~������400�~���̃J���������Y�̏ꍇ�͎��̕\�̒ʂ�ł��B
| �œ_���� | 24mm | 50mm | 100mm | 200mm | 300mm | 400mm |
|---|---|---|---|---|---|---|
| ���e�덷(�b) | 86" | 41" | 21" | 10" | 6.9" | 5.2" |
���ɁA�V�̖]�������g�������œ_�B�e�Ŏg�p�����500�~������3,000�~���̏œ_�����ł́A �K�C�h�G���[�̋��e�͈͈͂ȉ��̕\�ɂȂ�܂��B
| �œ_���� | 500mm | 800mm | 1000mm | 1500mm | 2000mm | 3000mm |
|---|---|---|---|---|---|---|
| ���e�덷(�b) | 4.1" | 2.6" | 2.1" | 1.4" | 1.0" | 0.7" |
������f�̃f�W�^���J�����ɂ́A���f��5��m���x�̃Z���T�[���p�����Ă��܂����A ���[�p�X�t�B���^�[��RGB�t�B���^�[�ŕ���\���ቺ���邽��10��m����ɂ��Ă��܂��B
���≖�t�B�����ł̎B�e�̏ꍇ�ɂ́A�t�B������̕������x��30��m�O��ƍl�����܂��̂ŁA ��L�̕\��萔�{�ɂ��l���Ă悢�ł��傤�B
����f�̃f�W�^�����t�J�����̉𑜓x�͍����̂ŁA�ʐ^�Ɏʂ鐯�����S�ɐ^�~�ɕۂ̂́A �Ȃ��Ȃ����������Ƃ��킩��܂��B ���������ۂ̎B�e�ł́A��C�̋C���̉e���ȂǂŐ������c���Ŏʂ邱�Ƃ����X���邽�߁A �����܂Ō����ɍl���Ȃ��Ă��悢��������܂���B
�ԓ��V�̒ǔ����x
 �ԓ��V�̒ǔ����x�́A�@��ɂ���đ傫�Ȃ��������܂��B
�ǔ����x�́A�s���I�f�B�b�N���[�V�����̑傫���ŕ\�����̂���ʓI�ŁA
���̒l���������قǐ��x���ǂ��ԓ��V�Ƃ������ƂɂȂ�܂��B
�ԓ��V�̒ǔ����x�́A�@��ɂ���đ傫�Ȃ��������܂��B
�ǔ����x�́A�s���I�f�B�b�N���[�V�����̑傫���ŕ\�����̂���ʓI�ŁA
���̒l���������قǐ��x���ǂ��ԓ��V�Ƃ������ƂɂȂ�܂��B
�s���I�f�B�b�N���[�V�����́A�s���I�f�B�b�N�G���[�Ƃ��Ă�Ă���Ƃ���A�ԓ��V����]����ۂɐ�����i�ݒx��̃G���[�̗ʂł��B �ԓ��V�ɂ͑����̃M�A���g�p����Ă��邽�߁A���̃M�A�̉��H���x��g�ݗ��Č덷�ɂ��A�����ꏭ�Ȃ����]�Ɍ덷�������܂��B ���̉�]�̃����͈̔͂��p�x�̕b�ŕ\�����̂��A�s���I�f�B�b�N���[�V�����ł��B
�s�̂���Ă��钆�^�ԓ��V�̃s���I�f�B�b�N���[�V�����́}�P�T�b�O�オ��ʓI�ŁA�ԓ��V����^�ɂȂ�قǏ��Ȃ��Ȃ�܂��B ��Ƀs���I�f�B�b�N���[�V���������b�Ƃ��������x�Ȑ��i������܂����A�}10�b�ȓ��ł���ΗD�G�Ȑԓ��V�ƍl������ł��傤�B ���ɂ́A�s���I�f�B�b�N���[�V������V�X�e��(PEC�)�ƌĂ��@�\�𓋍ڂ��A�����d�q�I�ɕ����@�������܂��B
�s���I�f�B�b�N���[�V�����̒l�́A�v���X�}�C�i�X(�})�ŕ\����܂��B �U���̐U���̒��S���[���Ǝ��A��������v���X�ƃ}�C�i�X���ɂǂꂾ���U�ꂽ����\���܂��B �Ⴆ�}�P�T�b�̐ԓ��V�Ȃ�A�S�̂Ƃ��ĂR�O�b�̐U�ꕝ�����邱�ƂɂȂ�܂��B
�s���I�f�B�b�N���[�V�����̑�����@
�s���I�f�B�b�N���[�V�����̑�����@�ɂ͂��낢�날��܂����A �Ɏ������炵�čP�����B�e���Ă݂�̂���y�ȕ��@�A��������l�����m�ł��B �ȉ��ɂ��̑�����@���Љ�܂��B
�@�ԓ��V�̋Ɏ������킹�ăZ�b�e�B���O���܂��B
�A�ԓ��V�̕��ʂ𓌂�����30���p���x���炵�ČŒ肵�܂��B���̂Ƃ��A���x�͂��̂܂܂ɂ��Ă����܂��B
�B�쒆�O��̐���]�����̎���ɓ���܂��B
�C�ԓ��V�̃��[�^�[�̓d���������Ă��邱�Ƃ��m�F���A�f�W�J���ł��̐����B�e���܂��B
�D�E�H�[�����Q��]������x�̘I�o���Ԃ������܂��B
�E����J��Ԃ��ĎB�e���܂��B
�F�Ō�ɗ��u�̂͂����肵����d�����B�e���A�s���I�f�B�b�N���[�V��������̂��߂̃X�P�[���ɂ��܂��B
�G��d���̊Ԋu�ƃs���I�f�B�b�N���[�V�����̔���Ƃ��āA�p�x�����߂܂�(���}�Q��)�B
�s���I�f�B�b�N���[�V��������̍ہA���邢����I�ԂƁA �����ɂ���ő���ł��Ȃ��Ȃ�܂��̂ŁA�Â�����I�т܂��傤�B �܂��A�]�����̏œ_�������Z���Ɗg�嗦���Ⴗ���đ��肪����Ȃ�܂��̂ŁA �Ȃ�ׂ��œ_�����̒����]������p����悤�ɂ��܂��B
�s���I�f�B�b�N���[�V��������킩�邱��
�B�e�����s���I�f�B�b�N���[�V�����̋O�Ղ���́A�i�ݒx��̃G���[�ʂ����łȂ��A �ԓ��V�̃��[�^�[��M�A�̏�Ԃ�������x�����ł��܂��B
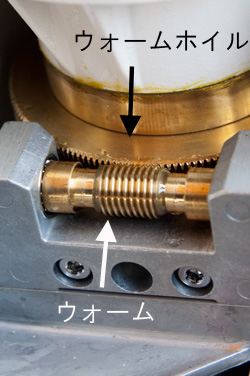
�s���I�f�B�b�N���[�V�����̋O�Ղ́A�ԓ��V�ɂ���ĈقȂ��Ă��܂��B �O�Ղ����炩�ȋȐ���`���ꍇ�́A�E�H�[���̕ΐS�������Ńs���I�f�B�b�N���[�V�������������Ă���\��������܂��B ����A�O�Ղ��M�U�M�U�̏ꍇ�́A�E�H�[���̎��̊��炩�����s�����Ă��邱�Ƃ��������ƍl�����܂��B
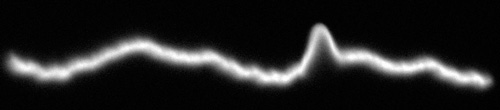
�܂��A��}(�C���[�W)�̂悤�Ɉ�ӏ������傫���O�Ղ���яo���Ă���ꍇ�́A�E�H�[���z�C���̎��ʂɏ�������̂�������܂���B �E�H�[���z�C���ɂ��̂悤�ȏ�������ƁA�ʏ�͂Ȃ߂炩�ɉ�]���Ă��܂����A ���̕����ɃE�H�[����������ƓˑR�Ԍo�����ɐ�������܂��B �V�̎ʐ^�Ō����s���̗��ꂪ���܋N����ꍇ�́A���̂悤�ȏ��ɂ����̂�������܂���B
�E�H�[���ƃE�H�[���z�C���͈قȂ�ގ��̋����ō����̂���ʓI�ł��B �E�H�[�����S�Ȃǂ̌ł������ō�������A�E�H�[���z�C���͐^�J�Ȃǂ̔�r�I�_�炩�������ō����ꍇ�������̂ŁA �傫�ȗ͂������ƃE�H�[���z�C���ɏ���������ꍇ������܂��B ���������_���l����ƁA�ԓ��V�͂ł��邾�����J�Ɉ����������悢�ł��傤�B
�s���I�f�B�b�N���[�V�����̉��P���@
 �s���I�f�B�b�N���[�V�����̑��茋�ʂɕs��������ꍇ�A���̃G���[�ʂ����Ȃ��������Ǝv����������܂���B
�������A��{�I�ɂ͐��x�s�ǂ̕��i���������邵���A�ԓ��V�̐��x��啝�Ɍ��コ������@�͂���܂���B
���x�̗ǂ��Ȃ����i�������烆�[�U�[���������Ă��A���ʓI�ɂ͂��܂�ς��Ȃ��Ǝv���܂��B
�s���I�f�B�b�N���[�V�����̑��茋�ʂɕs��������ꍇ�A���̃G���[�ʂ����Ȃ��������Ǝv����������܂���B
�������A��{�I�ɂ͐��x�s�ǂ̕��i���������邵���A�ԓ��V�̐��x��啝�Ɍ��コ������@�͂���܂���B
���x�̗ǂ��Ȃ����i�������烆�[�U�[���������Ă��A���ʓI�ɂ͂��܂�ς��Ȃ��Ǝv���܂��B
���i�����ɗ��炸�Ƀs���I�f�B�b�N���[�V���������コ������@�Ƃ��Ĉ�ʓI�Ȃ̂́A �E�H�[���ƃE�[�H���z�C�������݉�]�����邱�Ƃł��B ����́u�G�C�W���O�v�Ƃ��Ă�A�Ԍo�������x����]�����邱�Ƃɂ��A�E�H�[���M�A�̎��ʂ����炩�ɂ��A �s���I�f�B�b�N���[�V�����̗ʂ����Ȃ����悤�Ƃ������݂ł��B �s���I�f�B�b�N���[�V�����̋O�Ղ��M�U�M�U�̏ꍇ�ɁA���Ɍ��ʓI�ȉ��P���@�ł��B
�G�C�W���O���s���ۂɂ́A�]������o�����X�E�F�C�g��t������Ԃōs���̕����悢�ł��傤�B �ʏ�Ɏg�p���Ă����ԂŁA�Ȃ݂��^�]���s���킯�ł��B �Ȃ��݉�]�̌��ʂ������̂́A���Ȃ��Ƃ��E�H�[���z�C����50��]�قlj�]���Ă���ł��B �M�A�̂��ݍ��킹�̋�ɂ���Ă͈��e�����o��\��������̂ŁA�M�A�̂��ݍ��킹�̏�Ԃ��m�F���Ȃ���s�������悳�����ł��B �܂��A������]�����A�P�����̐��\�{���x�̑��x�ɂƂǂ߂Ă��������悢�Ǝv���܂��B
�E�H�[���ƃE�H�[���z�C���̗��z�I�Ȃ��ݍ��킹�́A�K�^���Ȃ��A���E�H�[��������ŃX���[�Y�ɉ邮�炢�ƌ����Ă��܂��B ���l�Ƃ��Ă�700g/cm�`1000g/cm���x���A �s�̂���Ă���ԓ��V�̃E�H�[�����̉�]�g���N�Ƃ��đ��������Ƃ���Ă��܂�(SkyWatcher�̎����u�e���X�R�[�v�Z�~�i�[�v���)�B
�ŋ߂̐ԓ��V�ɂ́A�E�H�[���M�A�̂��ݍ��킹�����l�W���Ȃ���Ă��邱�Ƃ������A ���̒��������[�U�[���ōs�����Ƃ͓���Ȃ��Ă��܂��B �������A�E�H�[���M�A�̂��ݍ��킹���������邽�߂Ƀs���I�f�B�b�N���[�V�������傫���Ȃ��Ă���ꍇ�������܂��̂ŁA ���̂悤�ȏꍇ�̓��[�J�[�_���ɏo���Ă݂Ă͂������ł��傤���B
�E�H�[���̎����ƘI�o����
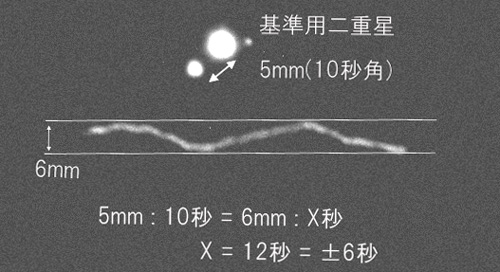
�s���I�f�B�b�N���[�V�����̓������O���t�ŋ[���I�ɕ\���ƁA�����悻���̂悤�ȃT�C���J�[�u��`���܂��B �[���_�𒆐S�ɂ��āA�v���X����}�C�i�X�����ւƂ���Ă��܂��B
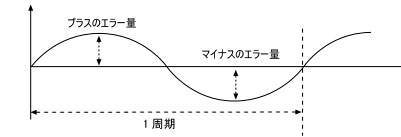
�P�����̒����́A�ԓ��V�Ɏg�p����Ă���E�H�[���z�C���̎����Ō��܂�܂��B �ԓ��V�ɗǂ��g�p����Ă��鎕��144���̃E�H�[���z�C���̏ꍇ�́A�P�����͂P�O���ƂȂ�܂��B
�܂�A�f�W�^�����t�J�����ŘI�o���ԂP�O���Ő�����B�e�����ꍇ�A ���̂P�������̃G���[���B�e�摜��ɕ\��邱�ƂɂȂ�܂��B
�����ŁA�I�o���Ԃ��̂T���ɂ��āA�s���I�f�B�b�N���[�V�����̊J�n���_����B�e�����ꍇ�ɂ́A ���������̉e�������܂���̂ŁA�B�e�̐��������オ��܂��B �R���A�Q���ƒZ������قǃG���[�̉e���͏��Ȃ��Ȃ�A�f�W�^�����t�J������ISO���x���グ�āA �����V���b�^�[���x�ŎB�e����قǗL���ɂȂ�܂��B
��ʓI�ɁA�E�H�[���z�C���̒��a���傫���Ȃ�ɂꎕ���͑����A�s���I�f�B�b�N���[�V�����͏������Ȃ�܂��B ����A������������Ǝ����͒Z���Ȃ�A�Z���I�o���Ԃł���������̃s���I�f�B�b�N���[�V�����̉e�����邱�ƂɂȂ�܂��B ���̕\�́A��ʓI�Ɏg���Ă���E�H�[���z�C���̎����Ƃ���ɑΉ�����P�����̎��Ԃł��B ������������قǂP�����̎��Ԃ��Z���Ȃ�̂��킩��܂��B
| �E�H�[���z�C���̎��� | 40�� | 72�� | 144�� | 180�� | 244�� | 360�� |
|---|---|---|---|---|---|---|
| �P�����̒���(��) | 36�� | 20�� | 10�� | 8�� | 6�� | 4�� |
�ԓ��V�Ɏg���Ă���E�H�[���z�C���̎�����40���܂Ō��点�A�s���I�f�B�b�N���[�V�����̎�����36���ƂȂ�܂��B �����x�ɋ����f�W�^�����t�J�������g���A�����̘I�o���ԂŐ����߂炦�邱�Ƃ��ł��܂��̂ŁA �s���I�f�B�b�N���[�V�����̂����ꕔ�̉e�������܂���B ���������Ȃ��قǑS�̂̃s���I�f�B�b�N���[�V�����͑傫���Ȃ�܂����A �ȏ�̗��_�����p�����|�[�^�u���ԓ��V����������Ă��܂��B
�Ɏ��̐ݒu�덷
��������Ďʂ邻�̑��̌����Ƃ��āA�Ɏ��̃Z�b�e�B���O�덷������܂��B �ԓ��V�̉�]�����V�̖k�ɂɐ��m�Ɍ����Ă��Ȃ��ƁA�J�����͐��̓����ƈقȂ�����ɓ����̂ŁA ���Ԃ̌o�߂Ƌ��ɃY���������A�������ɂȂ��Ďʂ��Ă��܂��܂��B
���̋Ɏ��̐ݒu�덷��h���ɂ́A�ԓ��V�̉�]���𐳊m�ɓV�̖k�ɂɌ����邱�Ƃ��K�v�ł��B �ŋ߂̐ԓ��V�ɂ͋Ɏ��]��������������A�k�ɐ���ڈ��ɂ��ċɎ������킹�邱�Ƃ��ł���悤�ɂȂ��Ă��܂��B
�L�p�����Y�ł̎B�e��O��ɍ��ꂽ�|�[�^�u���ԓ��V�ɂ́A �Ɏ��̕����̖ڈ��Ƃ��Ă̂�����(�f�ʂ���)���Ă��܂��B ���̏ꍇ�́A���̂̂��������g���āA�ԓ��V�̉�]���������悻�V�̖k�ɂւƌ����܂��B
�����ŋC�ɂȂ�̂́A�Ɏ��̐ݒu�덷���B�e�摜�ɂǂ̂��炢�e�����y�ڂ����Ƃ����_�ł��B �u�����P�O�� �f�W�^���V�̎ʐ^�̂��߂̓V�̖]�����K�C�h�v�̃f�[�^�[���Q�l�ɁA �ǂ̒��x�̐ݒu���x���K�v���l���Ă݂܂��傤�B
�Ȃ��A�Ɏ��̃Y���̉e���́A�B�e����V�̂̈ʒu�ɂ���ĈقȂ��Ă��܂��B �Ԉ܂��傫��(�k�ɐ��ɋ߂�)�قNjɎ��̃Y���̉e���͎ɂ����A �V�̐ԓ��t�߂ł͐��̈ړ��ʂ��傫�����߁A�Y���̉e����傫���܂��B
���̕\�́A�Ɏ��̐ݒu�덷��7�x����1���܂ł̏ꍇ�A�g�p���Ă��郌���Y�̏œ_�����ɂ���āA 4���Ԃɍő�łǂ̂��炢����Ă��܂��������������̂ł��B �Y���̗ʂ́u��m�v�ŕ\���Ă��܂��B
| �ݒu�덷�� �œ_������ |
7�x | 3�x | 41�� | 10�� | 3�� | 1�� |
|---|---|---|---|---|---|---|
| 24mm | 51��m | 22��m | 5��m | 1��m | 0��m | 0��m |
| 35mm | 75��m | 32��m | 7��m | 2��m | 1��m | 0��m |
| 50mm | 107��m | 46��m | 10��m | 3��m | 1��m | 0��m |
| 100mm | 213��m | 91��m | 21��m | 6��m | 2��m | 1��m |
| 200mm | 426��m | 183��m | 42��m | 10��m | 3��m | 1��m |
| 300mm | 640��m | 274��m | 62��m | 15��m | 5��m | 2��m |
�Q�l�F�u�f�W�^���V�̎ʐ^�̂��߂̓V�̖]�����K�C�h�v
���̃f�[�^�[������ƁA50mm���x�̕W�������Y�ł̎B�e���ɁA10��m�ȓ��̌덷�ɗ}���悤�Ƃ���ƁA �Ɏ��̃Z�b�e�B���O�덷��41���ȓ�(0.68�x�ȓ�)�ɉ�������K�v������܂��B 4���̘I�o�ł��ꂾ���̐��x���K�v�ɂȂ�̂ŁA10���̘I�o�ł��̊���Ɏ��߂悤�Ǝv���A ��萳�m�ɓV�̖k�ɂɌ�����K�v������܂��B
�X�P�[���p�^�[�����������Ɏ��]�������g���A�����ȓ��̐ݒu�덷�Ɏ��߂邱�Ƃ��ł��܂����A �̂�������8�x�`9�x�̎��E�����邽�߁A1�x�ȓ��̌덷�ɋɎ������킹��̂͗e�Ղł͂���܂���B
�Y����10��m�ȓ��Ƃ������f����Â�������e�͈͂��傫���Ȃ�܂����A �f�W�^���摜�̓p�\�R����ŗe�ՂɊg��ł���̂ŁA���̗��ꂪ�C�ɂȂ�₷�����̂ł��B
�k�ɐ��̈ʒu
 �����Ŗk�ɐ��̈ʒu���Ċm�F���Ă����܂��傤�B
�ԓ��V�̉�]���𐳊m�ɓV�̖k�ɂɌ�����ۂɂ́A�k�ɐ����w�W�Ƃ��܂����A
���̖k�ɐ����V�̖k�ɂ���͂킸���ɂ���Ă��܂��B
�����Ŗk�ɐ��̈ʒu���Ċm�F���Ă����܂��傤�B
�ԓ��V�̉�]���𐳊m�ɓV�̖k�ɂɌ�����ۂɂ́A�k�ɐ����w�W�Ƃ��܂����A
���̖k�ɐ����V�̖k�ɂ���͂킸���ɂ���Ă��܂��B
�摜�͓V�̖k�ɕt�߂��ʂ����ʐ^�ł��B �ʐ^�E���̖��邢�����k�ɐ��ł����A���쒆�S�̓V�̖k�ɂ̎��������^�����Ă���̂��킩��܂��B ���̓V�̖k�ɂ���̃Y���̗ʂ͂��悻41���ł��B �ԓ��V�̉�]���𐳊m�ɓV�̖k�ɂɍ��킹�悤�Ǝv���A����41���̌덷���l���Ėk�ɐ�������ɓ�������K�v������܂��B
�Ɏ��]�����ɂ́A�Ɏ������킹�邽�߂̃X�P�[���p�^�[�����`����Ă��āA �ꏊ�Ɠ��t�Ǝ��Ԃ����킹�邱�ƂŁA���m�ɐԓ��V�̉�]����V�̖k�ɂɌ����邱�Ƃ��o���܂��B �]�������Y�ł̎B�e��z�肵�Ă���Ȃ�A�Ɏ��]�������g���������悳�����ł��B
�ǂ��܂ł̐��x���K�v��
�����܂ł̓p�\�R���Ńs�N�Z�����{���Ă��킩��Ȃ����x�̃Y�������e�͈͂Ƃ��Ă��܂������A �����������ꂾ���̐��x���K�v�Ȃ̂ł��傤���B ����̎ʐ^����ʓI��A4�T�C�Y�̎ʐ^�p���Ƀv�����g�����ꍇ���l���Ă݂܂��傤�B
�܂��l�Ԃ̊�̔\�͎͂��͂ŕ\����܂����A���͂P�D�O�Ƃ͊p�x�ɂ��ĂP���̕��̂��ł���\�͂ł��B ��ʂ̎��͌����ł́A����̌��Ԃ��J����ꂽ�����h���g���p�����Ă��܂��B ���͂P�̏ꍇ�́A�u5m���ꂽ�Ƃ��납��1.45mm�̌��Ԃ��������h���g�ʂł���\�́v�Ƃ���Ă��܂��B
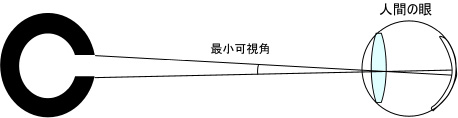
�����ŁA���̎��͂P�̐l���A�v�����g����50�Z���`�����A4�T�C�Y�̎ʐ^�������Ƃ����l���Ă݂܂��B ������50�Z���`�ƒZ���Ȃ�̂ŁA�Ⴊ�����ł���ł������Ȍ��Ԃ͖�0.145mm�ƍl�����܂��B
APS-C�T�C�Y�̃f�W�^�����t�J�����̉摜��A4�T�C�Y�̎ʐ^�p���Ƀv�����g�����ꍇ�A A4�v�����g�ւ̃v�����g�{���͖�13�{�ɂȂ�܂��B ���̎��AA4�v�����g��ł�0.145mm�̃Y���́A�Z���T�[��ł͖�0.011mm(11��m)�ƂȂ�܂��B �B�e�J������35�~���t���T�C�Y�̏ꍇ�̓v�����g�g�嗦����8�{�ɉ�����܂��̂ŁA �Z���T�[��̃Y���́A��18��m�ƂȂ�܂��B
| �J�����̎�� | APS-C�f�W�J�� | 35�~���t���T�C�Y |
|---|---|---|
| �Y���̋��e�͈� | ��11��m | ��18��m |
��A4�T�C�Y�̃v�����g�����͂�1�̐l��50�Z���`����Č����Ƃ��ɔ��ʂł���Y������v�Z���������悻�̒l
�������čl����ƁA�t���T�C�Y�̃J�������g�p�����ꍇ�͎�ɂ��Ȃ�܂����A ���e�ł���Y���͈̔͂�10��m�O��Ƃ����̂́A���Ȃ�������������l�ł͂Ȃ��悤�ł��B �������ۂ́A�͂��Ȑ��̃Y���͖ڗ����Ȃ����Ƃ������̂ŁA�����Â߂ɍl���Ă��ǂ���������܂���B
�܂Ƃ�
����܂ł̍l�@�̌��ʂ���A�f�W�^�����t�J�����͉𑜓x�������̂ŁA �͂��ȃY���ɂ��q���ł��邱�Ƃ��킩��܂����B �����x�ȃf�W�^���J�����͎B�e���Ԃ��Z�����߁A�ǔ��G���[��ݒ�덷�̉e�����ɂ����ʂ͂���܂����A �����ɍl����ƌ������l�ł��邱�Ƃ��킩��܂��B
�L�p�����Y�Ȃ炢���m�炸�A�����Ԃ̎B�e�Ő���^�~�ɕۂƂ��Ǝv���Ȃ�A �Ɏ��]�������g���ċɎ��𐳊m�ɍ��킹�āA���m�ɐ���ǔ�����ԓ��V���g�����Ƃ��K�v�ł��傤�B ���]�������Y��V�̖]�����ł̎B�e�ɂȂ�A�ԓ��V�̎����ǔ��ł͒ǂ������A �ǔ����Ď�����I�[�g�K�C�h���u���K�v�ɂȂ邱�Ƃ����Ď��܂��B